Объединенный датчик управления динамической устойчивостью Mazda 6 2002-2015
Датчик угловой скорости рыскания и датчик боковой перегрузки объединены.
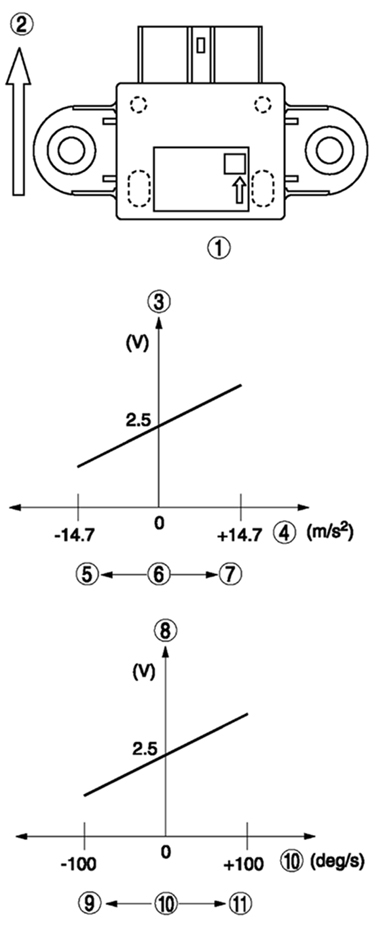
Объединенный датчик установлен на левой стороне рычага стояночного тормоза (модели с левым расположением рулевого управления) или на правой стороне рычага стояночного тормоза (модели с правым расположением рулевого управления) и определяет угловую скорость рыскания автомобиля (угловая скорость автомобиля в повороте) и продольное ускорение. Датчик передает сигнал системе DSC HU/CM.
Выходное напряжение объединенного датчика (2.5 в, когда автомобиль неподвижен) изменяется в соответствии с угловой скоростью рыскания и величиной продольного ускорения.
Угловая скорость рыскания определяется, когда датчик определяет силу Кориолиса, пропорциональную скорости вращения.
Величина продольного ускорения определяется, когда датчик определяет силу инерции, пропорциональную продольному ускорению, действующему на кремниевый чувствительный элемент.
| ПРИМЕЧАНИЕ Сила Кориолиса. Когда объект, расположенный на вращающемся диске, перемещается к его центру, генерируется сила, направленная под прямым углом к траектории перемещения объекта. Эта приводит к тому, что направление перемещения объекта остается неизменным относительно точки отправления, и объект не достигает центра. Эта сила, отклоняющая объект от центра, называется силой Кориолиса, а фактическое перемещение объекта является прямолинейным. |
|
|
Рис. 6.10. Схема работы объединенного датчика управления динамической устойчивостью автомобиля Мazda 6: 1 – внешний вид; 2 – передняя часть автомобиля; 3 – выходное напряжение; 4 – ускорение; 5 – левый поворот; 6 – продольное ускорение; 7 – правый поворот; 8 – выходное напряжение; 9 – левый поворот; 10 – угловая скорость рыскания; 11 – правый поворот |
Раздел 1. Эксплуатация и техническое обслуживание автомобиля
Описание автомобиля
Система пассивной безопасности
Использование автомобиля по назначению
Устранение неисправностей, возникших в пути или перед началом движения
Раздел 2. Двигатель
Общее описание новых двигателей моделей L8, LF и L3
Механическая часть двигателей
Приложение 1
Приложение 2
Приложение 3
Раздел 3. Трансмиссия
Сцепление
Механическая коробка передач
Автоматическая коробка передач
Приводной механизм
Раздел 4. Ходовая часть
Общие сведения
Колеса и шины
Передняя подвеска
Задняя подвеска
Раздел 5. Рулевой механизм
Общие сведения
Общие проверки
Рабочие операции с рулевым механизмом
Снятие и установка насоса гидроусилителя
Раздел 6. Тормозная система
Общие сведения
Тормозная система
Раздел 7. Бортовое электрооборудование
Общие сведения
Система электроснабжения
Система освещения
Стеклоочистители и стеклоомыватели
Иммобилайзер
Центральная панель и динамики
Комбинация приборов и органы управления
Система пассивной безопасности
Раздел 8. Кузов
Общие сведения
Кондиционер и отопитель