Рулевое управление с переменной характеристикой (в зависимости от частоты вращения двигателя) Mazda 6 2002-2015
Конструкция и работа системы рулевого механизма в основном заимствованы от модели 626 (GF), за исключением следующего.
На автомобилях Mazda 6 используется телескопический механизм с переменной характеристикой.
|
|
Рис. 5.2. Схема работы рулевого механизма с переменной характеристикой: 1 – рулевое колесо; 2 – рулевой вал; 3 – промежуточный вал; 4 – рулевой механизм; 5 – сечение A-A; 6 – со стороны рулевого механизма; 7 – со стороны рулевого колеса; 8 – U-образная пластина; 9 – внутренний вал; 10 – наружная колонка; 11 – кронштейн; 12 – нормальное положение; 13 – при столкновении |
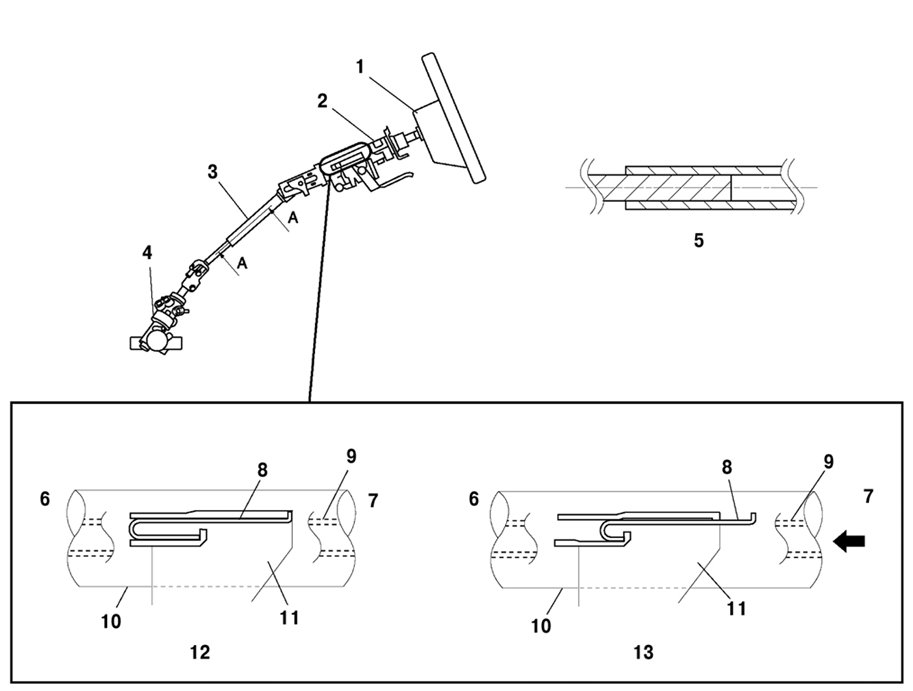
Рулевой механизм соединен с рулевым валом через промежуточный вал (рис. 5.2). Во время столкновения промежуточный вал разрушается при движении рулевого механизма назад, таким образом достигается снижение энергии удара.
В случае удара тела водителя о рулевое колесо, сила удара передается от рулевого колеса к внутреннему валу, наружной колонке и кронштейну крепления. При этом кронштейн крепления отделяется от панели приборов и весь рулевой вал смещается вперед. После этого U-образная пластина, закрепленная на панели приборов с одной стороны и удерживаемая кронштейном крепления с другой деформируется и поглощает энергию удара.
Раздел 1. Эксплуатация и техническое обслуживание автомобиля
Описание автомобиля
Система пассивной безопасности
Использование автомобиля по назначению
Устранение неисправностей, возникших в пути или перед началом движения
Раздел 2. Двигатель
Общее описание новых двигателей моделей L8, LF и L3
Механическая часть двигателей
Приложение 1
Приложение 2
Приложение 3
Раздел 3. Трансмиссия
Сцепление
Механическая коробка передач
Автоматическая коробка передач
Приводной механизм
Раздел 4. Ходовая часть
Общие сведения
Колеса и шины
Передняя подвеска
Задняя подвеска
Раздел 5. Рулевой механизм
Общие сведения
Общие проверки
Рабочие операции с рулевым механизмом
Снятие и установка насоса гидроусилителя
Раздел 6. Тормозная система
Общие сведения
Тормозная система
Раздел 7. Бортовое электрооборудование
Общие сведения
Система электроснабжения
Система освещения
Стеклоочистители и стеклоомыватели
Иммобилайзер
Центральная панель и динамики
Комбинация приборов и органы управления
Система пассивной безопасности
Раздел 8. Кузов
Общие сведения
Кондиционер и отопитель